Complete workflow from CAD files to animated physics using Unreal Engine 5 Control Rig
Over the past months, I've had the privilege of working alongside Epic Games' exceptional team, talented instructors, and an amazing technical artist to master one of Unreal Engine's most powerful features: Control Rig. What started as a technical challenge—rigging the SO-ARM 100 educational robot entirely within Unreal—became a transformative learning experience that fundamentally changed how I approach digital content creation.
Step 1: Download the Original STEP Files
STEP files (.step or .stp) are the industry standard for CAD data exchange. Engineers use these files for manufacturing, rapid prototyping, and robotics applications. They contain precise geometric and assembly information that we'll leverage for our rig. You can download the open source original files from TheRobotStudio Github.
Why STEP files?
Step 2: Convert STEP to glTF Using FreeCAD
Download FreeCAD: https://www.freecad.org/downloads.php
Conversion Process:
Why glTF?
Step 3: Import and Transform Correction
Import the glTF into Unreal:
Fix Transform Offsets:
Position the Arm for Rigging then combine:
Pro Tip: I found it helpful to separate the meshes initially rather than combining them immediately. This separation made weight painting much more manageable, as I could work on each servo and arm segment independently.
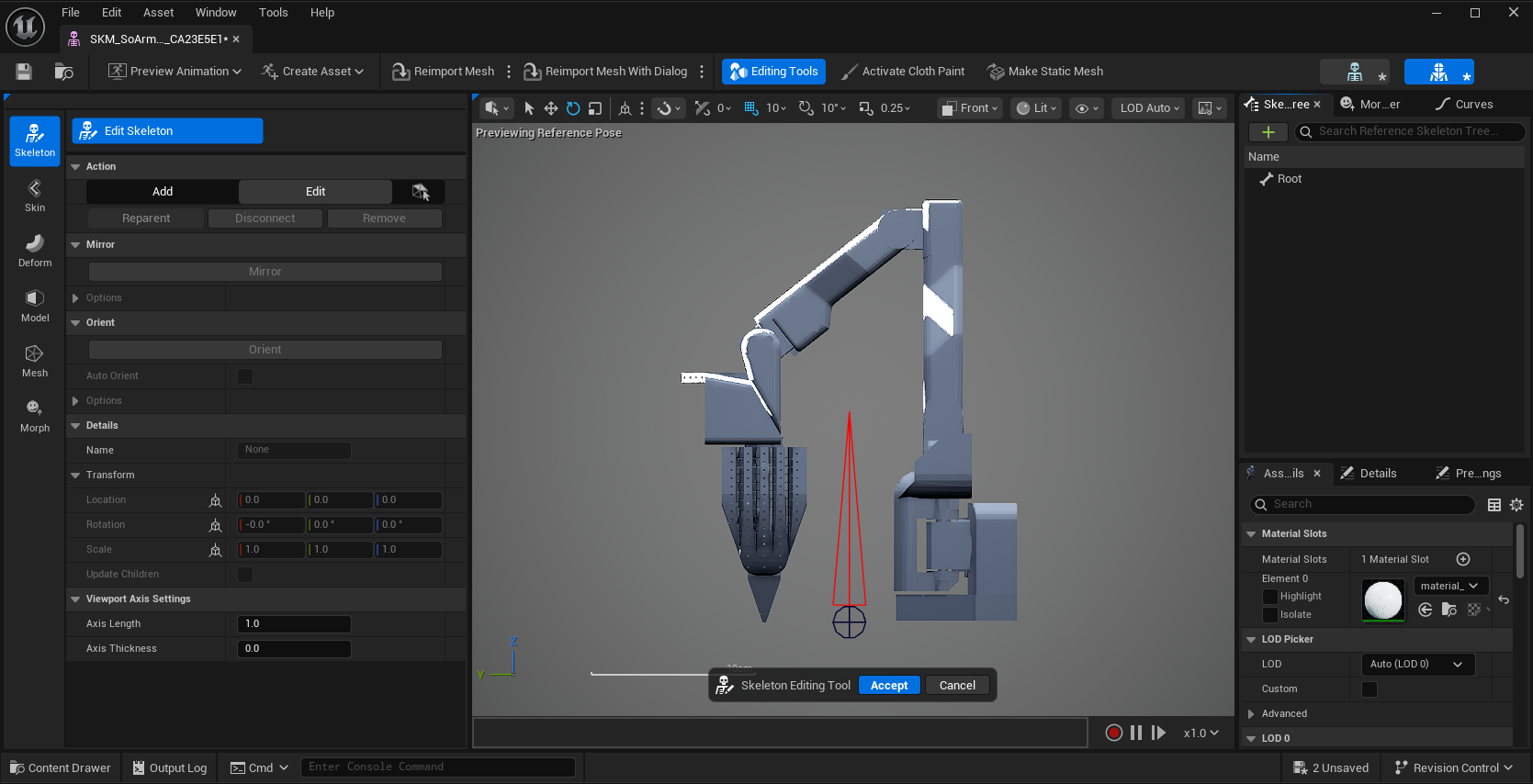
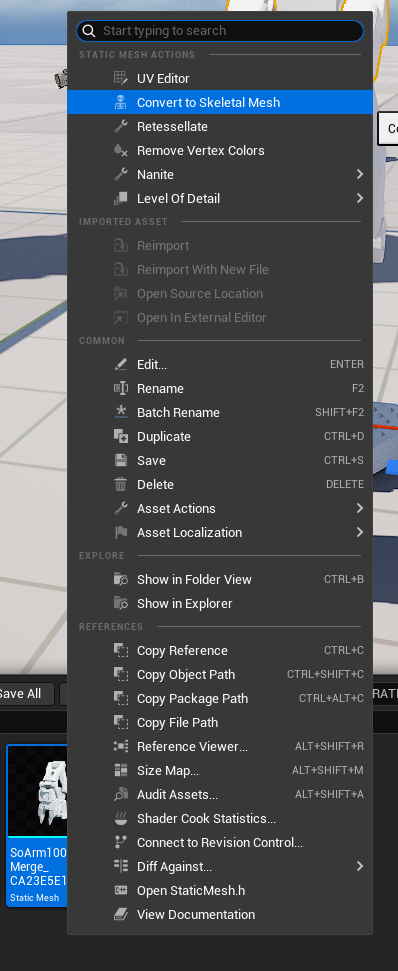
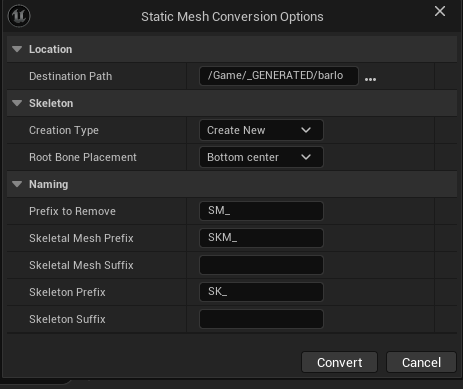
Step 4: Convert to Skeletal Mesh
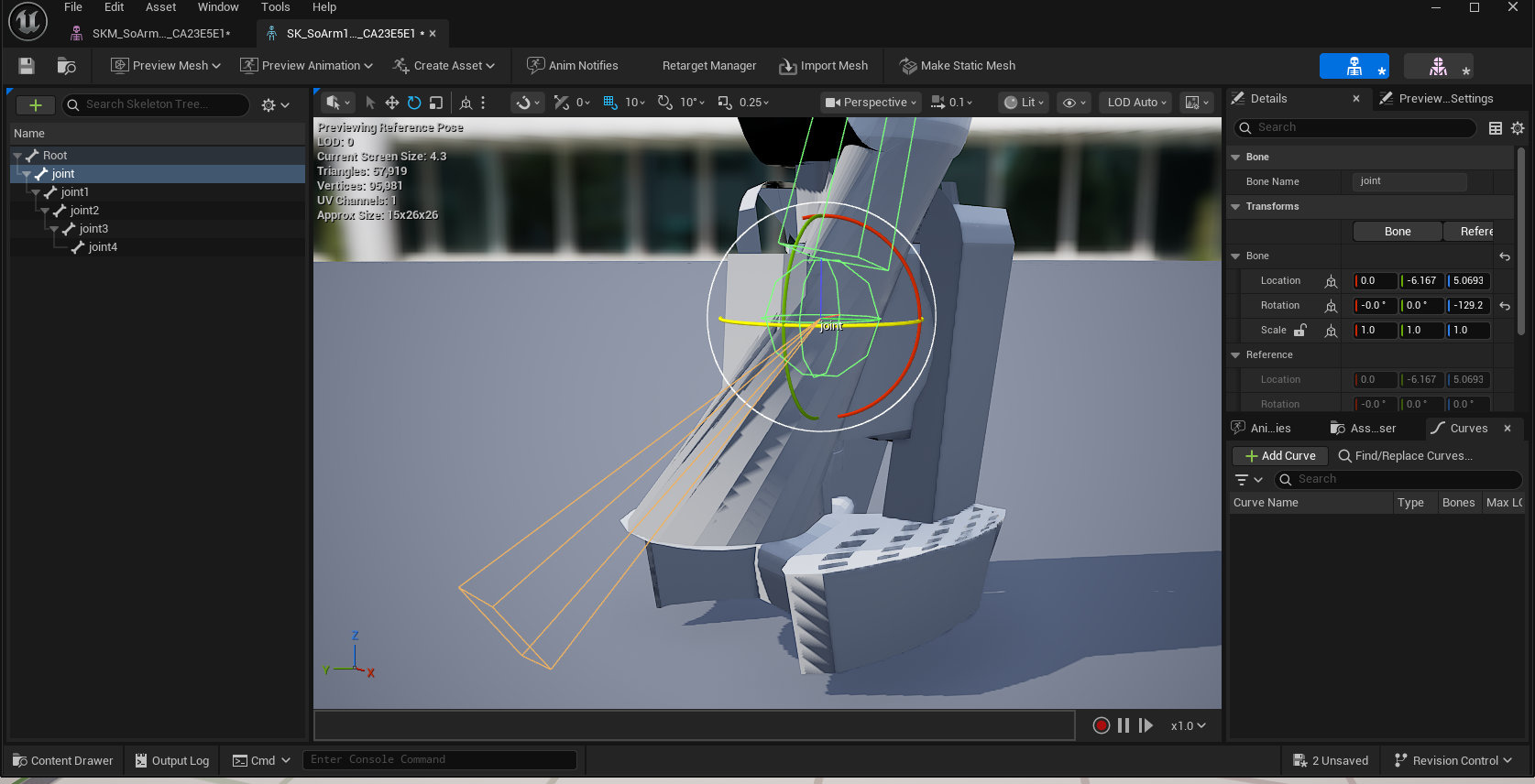
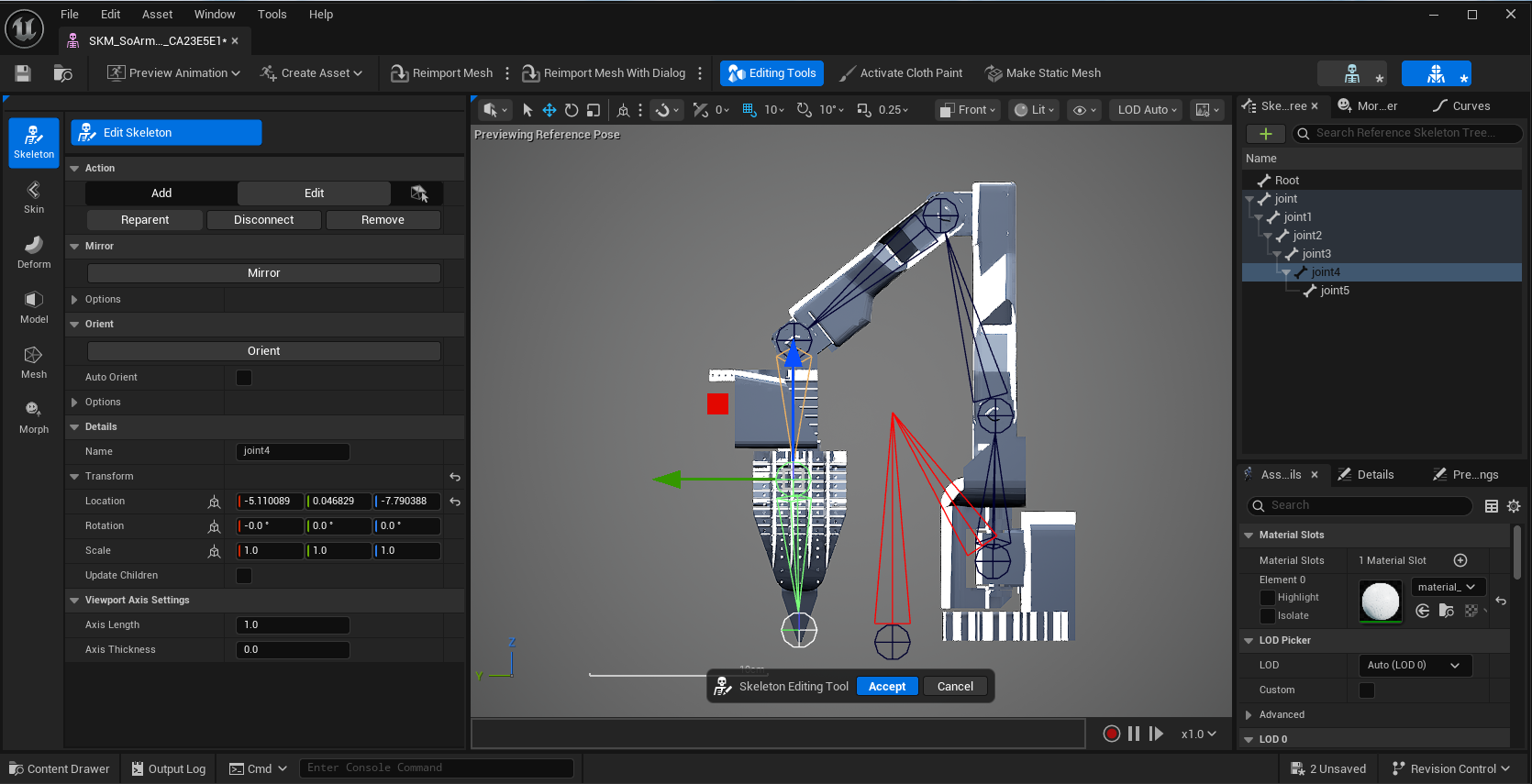
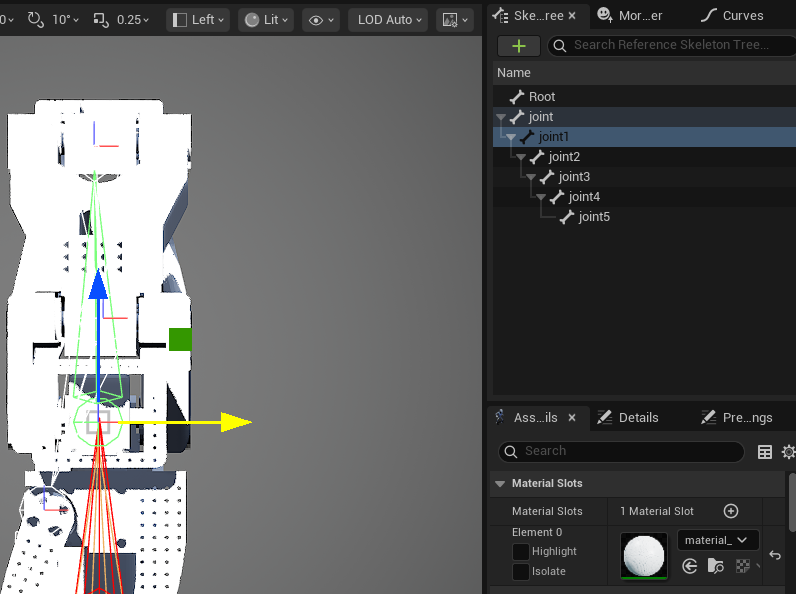
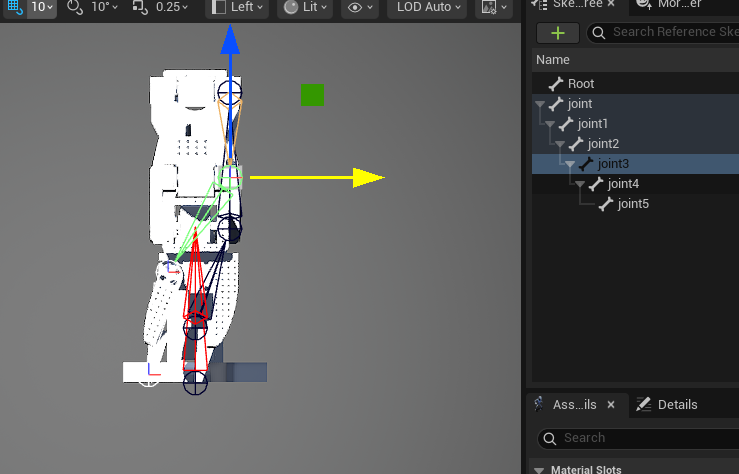
Step 5: Manual Bone Placement
This is where precision matters. The SO-ARM 100 has servo motors at each joint—these are our rotation points.
My Strategy:
Bone Naming Convention:
Why this approach works:
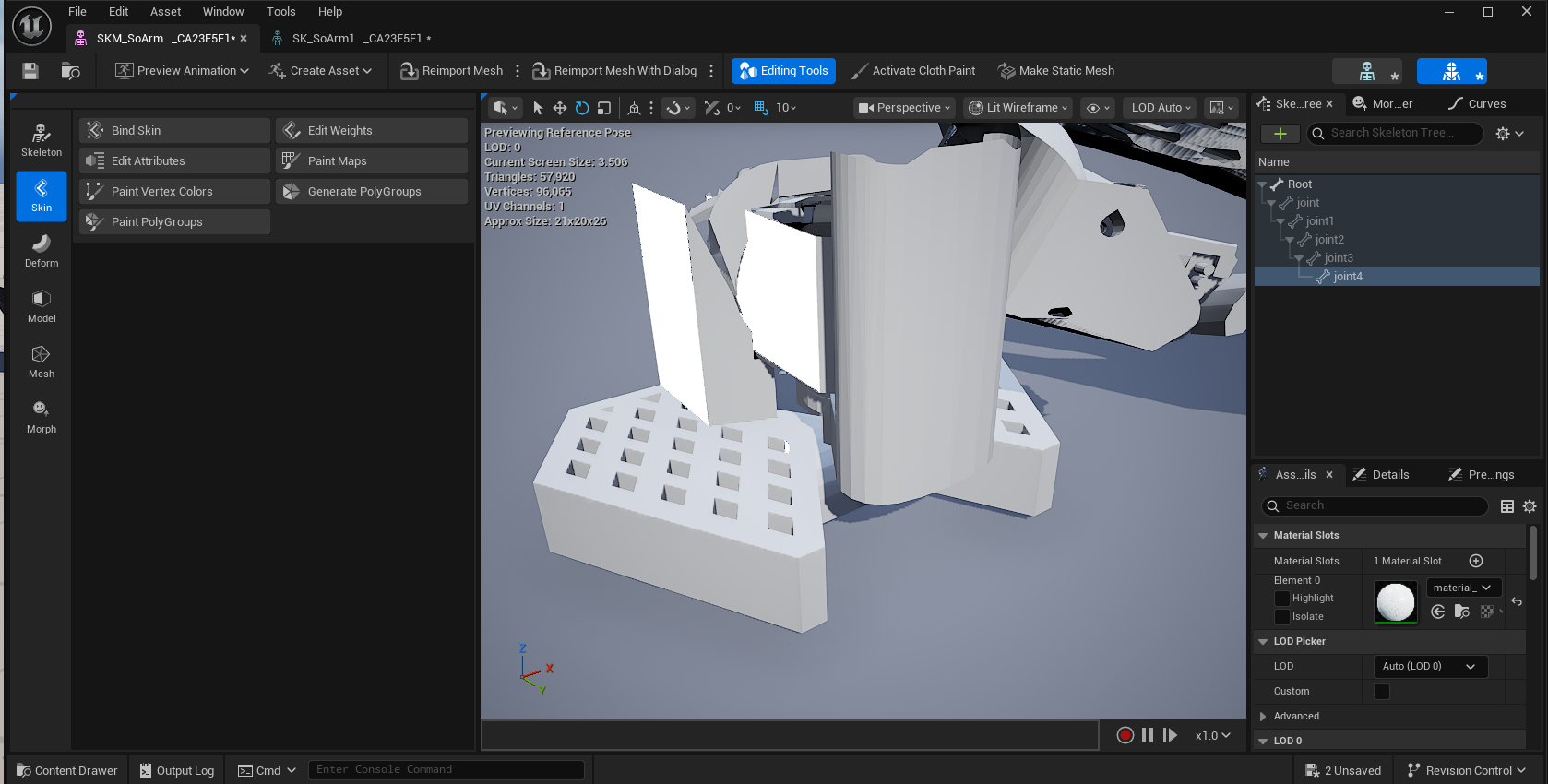
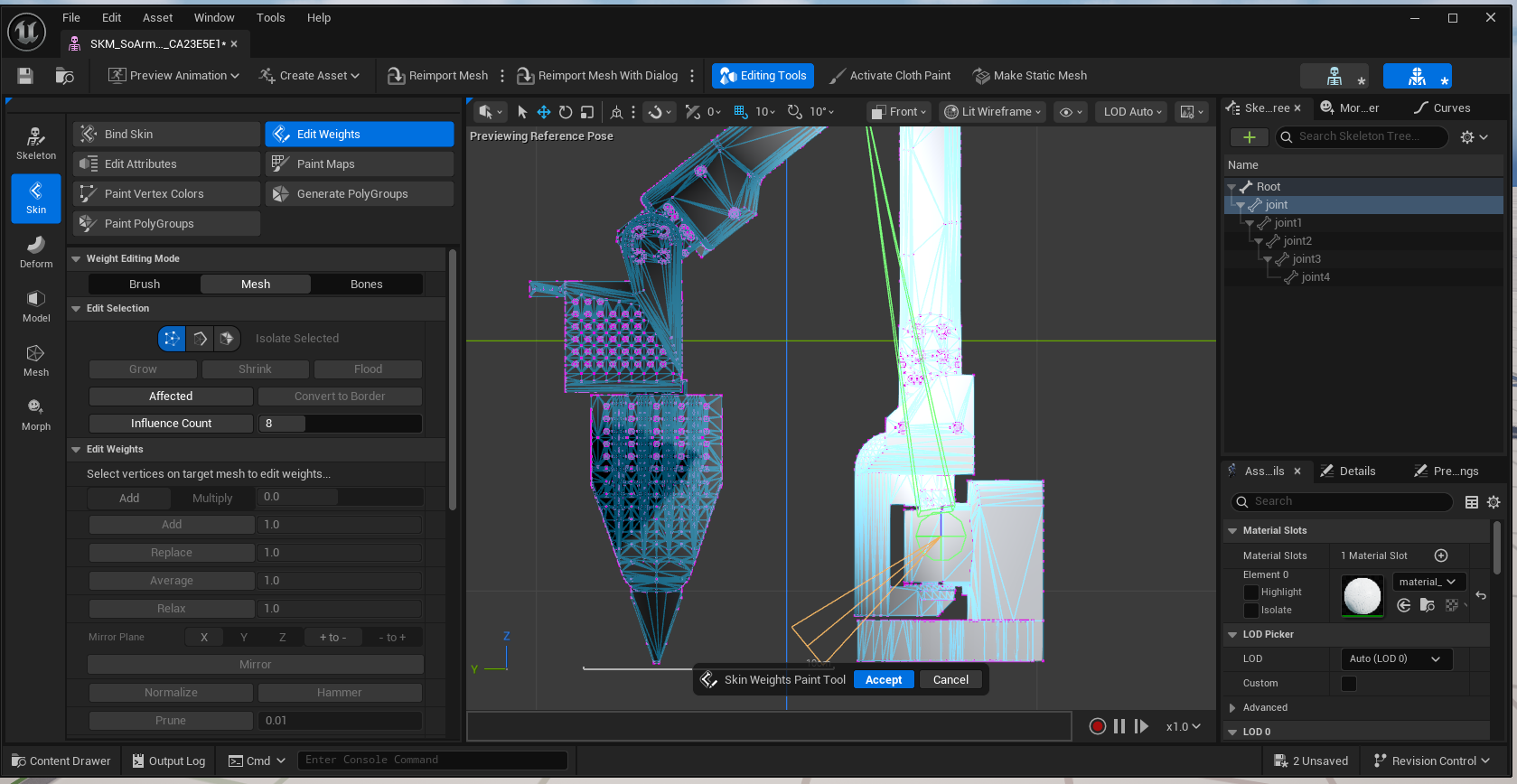
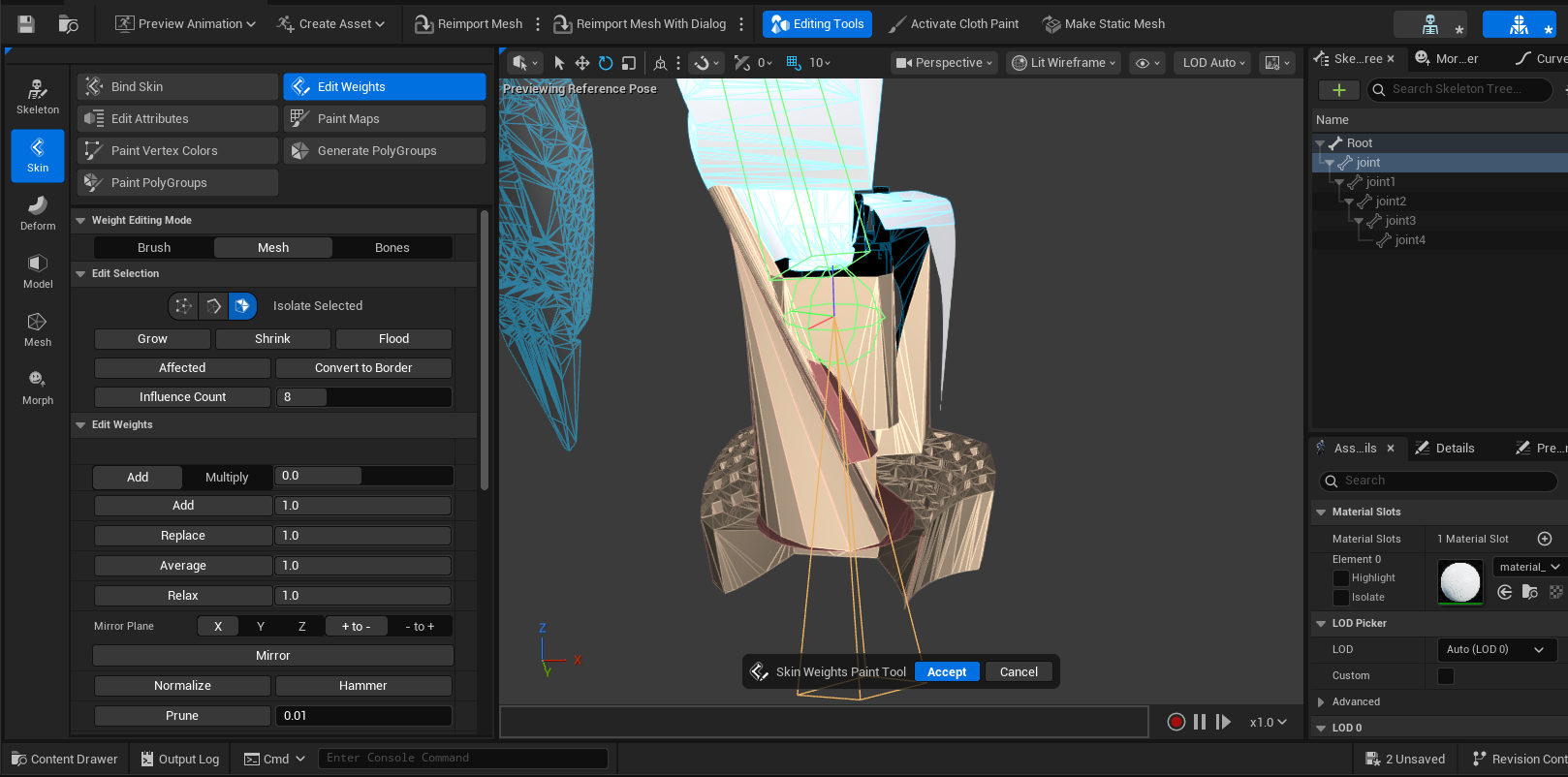
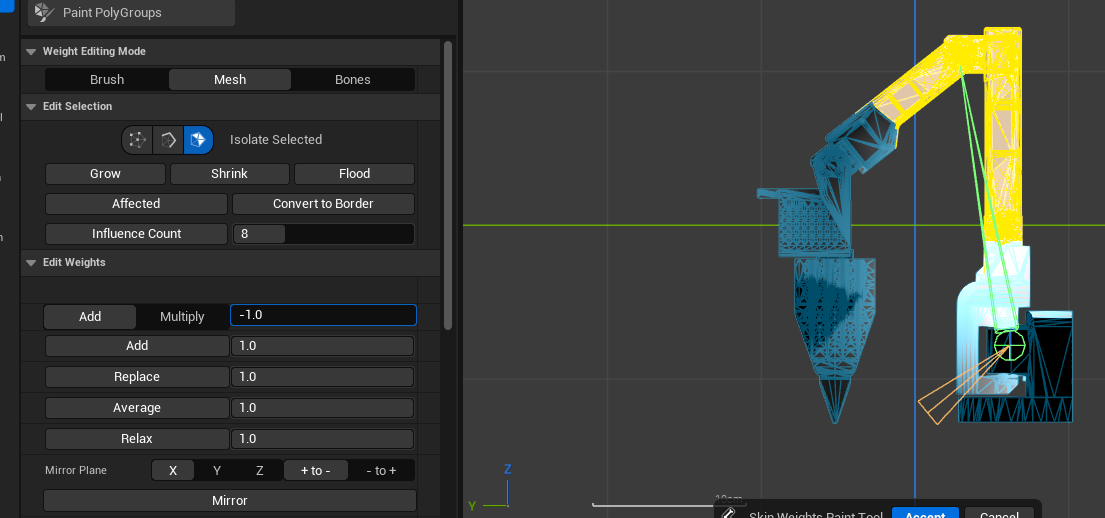
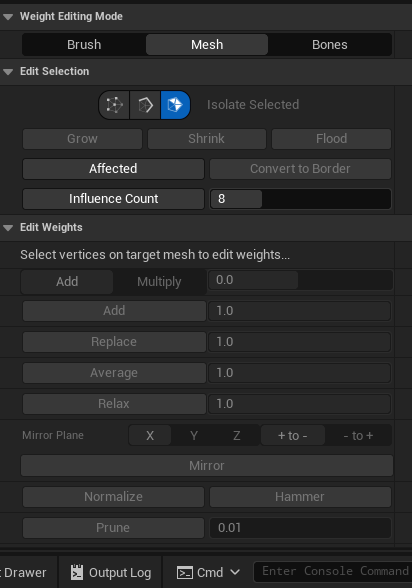
Step 6: Weight Painting Strategy
This is where working in breaks with separated meshes paid off tremendously.
My Workflow:
Critical Insight: The real-time viewport feedback in Unreal made this process incredibly efficient compared to traditional DCCs. I could immediately see if vertices were caught in the wrong influence zone and fix them on the spot.
Step 7: Create Modular Control Rig
Finally, the moment we've been working toward! This is where Unreal's Control Rig system truly shines.
The Setup:
Step 8: Add Physics Dynamics (Chain Dynamics)
Here's where we make the digital robot feel like the physical one.
Implementation:
The Result: With just a few clicks, you have a fully rigged robot ready for animation with realistic physics behavior!
Step 9: Expose Controls for Animators
The beauty of Control Rig is creating an animator-friendly interface:
Step 10: Real-time Visualization
With Control Rig, you can:
I've discovered that redoing projects in Unreal always works out in the long run. There's a profound rhythm to it:
Each iteration revealed new layers. Control Rig isn't just about making things move—it's about building intelligent, procedural systems that respect the underlying mechanics of what you're animating.
Challenges I Faced:
Critical Lesson - Make Copies & Backups: I had to redo the whole weight painting because I did not make a copy. Make Copies - Backups many times they can be a way to debug your own work better. I made a mistake of missing this crucial step and because of time constraints I did not clean up the mesh 100%.
Start Learning Strategy: Begin with low poly CAD model exports then move on to more complex intensive tasks. Unreal can handle a lot what you throw at it in terms of mesh count and vertices but keeping things sane is always better for the UI responsiveness.
Breakthroughs That Made It Worth It:
None of this would have been achievable without extraordinary support:
Special thanks to: Julie Lottering, Chase Cooper, Jeremie Passerin, Matt Ringot, Sara Schvartzman, Ferris Webby, Helge Mathee, Benoit Gaudreau, James Burton, Shenaz Baksh, Sean Spitzer, and Kevin Miller.
The SO-ARM 100 project represents proof that Unreal Engine can serve as a complete content creation environment, not just a rendering engine. For projects demanding tight integration between animation, physics simulation, real-time interaction, and educational visualization, being able to rig entirely within Unreal eliminates entire categories of pipeline friction.
For my work in medical education and AR/VR training, this workflow opens incredible possibilities:



